AbLECPS
Assurance-based Learning Enabled Cyber Physical Systems
Home » UUV Activity definitions
UUV Example:
This toolchain is capable of simulating an autonomous BlueROV2 UUV in an underwater environment, also the runtime code is prepared to operate on the real ROV hardware as well - what is not part of the release yet.
The software is based on ROS Melodic and Gazebo, an open source 3D robotics simulator.
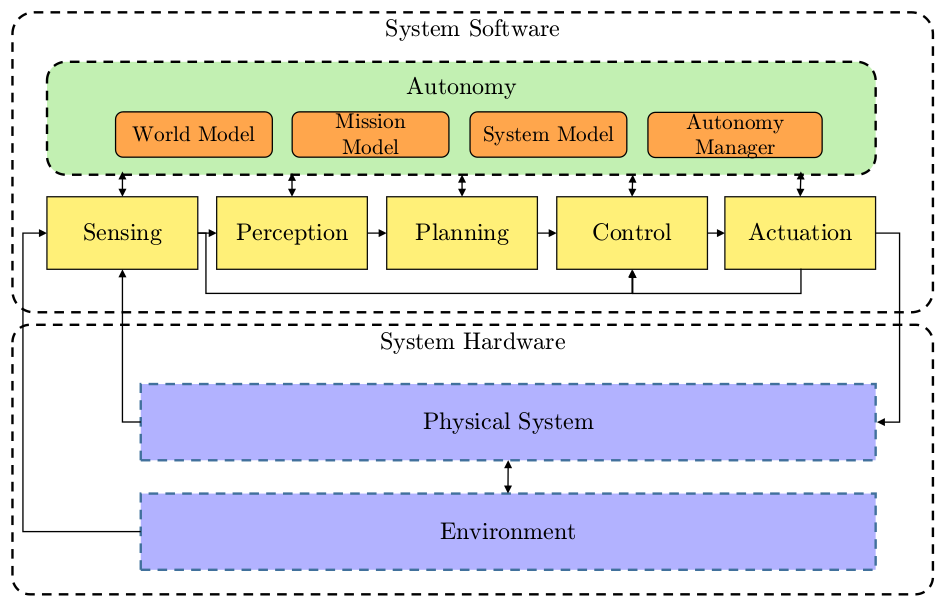
The system is divided into hardware, which is the UUV itself including thrusters, sensors, etc., and software, which includes the autonomy engine and sensing-to-actuation pipeline. The autonomy engine consists of a world model which describes the UUV’s operating environment, including the occupancy-grid based pipeline map, obstacle map and other smaller maps for navigation and guidance. The mission model describes the UUV mission with the help of a mission file (what to execute) and a mission server (how and when to execute). The system model is a representation of the UUV operational state, either nominal or degraded, and any identified hazards such as low battery or obstacle detected. The autonomy manager implements the higher-level autonomy in the system, including the mission execution, and LEC-based fault-adaptive operation.
For detailed information about the BlueROV2 Behaviour Tree based autonomy and the fault detection topic please check our paper: https://www.mdpi.com/1424-8220/21/18/6089